
")
BiVoS (Bidirectional Voltage Switching) - проект по созданию силового преобразователя с произвольными входными и регулируемыми выходными напряжениями, обладающего при этом исключительными динамическими характеристиками и возможностью рекуперировать энергию.
Мотивация:
Силовая электроника – это междисциплинарная наука, изучающая способы преобразования и контролирования электрической энергии с помощью так называемых «ключей» (полупроводниковых диодов и транзисторов) и реактивных элементов (индуктивностей и емкостей). С развитием электроники в целом растут и требования предъявляемые к силовой электронике, от которой в первую очередь требуется повышение плотности мощности, что невозможно без качественного развития технологий, ею используемых. В ответ на растущие требования силовая электроника начинает использовать новые методы, такие как цифровое управление, топологии со сверхвысокими частотами преобразования, перспективные полупроводниковые устройства.
«Если бы авиапромышленность в последние 25 лет развивалась столь же стремительно, как промышленность средств вычислительной техники, то сейчас самолёт Boeing 767 стоил бы 500 долл. и совершал облёт земного шара за 20 минут, затрачивая при этом пять галлонов (~18,9 л) топлива. Приведенные цифры весьма точно отражают снижение стоимости, рост быстродействия и повышение экономичности ЭВМ».
Эта мысль была озвучена еще в 1984 году, а в настоящее время электроника достигла такого уровня, что эта фраза выглядит слегка пессимистично.
Тенденции развития:
Как уже было сказано, от силовой электроники требуется повышение плотности мощности, но какими путями достигается результат? Существует несколько основных тенденция развития в силовой электроники, которые можно разбить на 3 групп (разбиение очень условное, так как эти группы сильно взаимосвязаны в своем влиянии друг на друга).
- Увеличение частот работы преобразователя
- Использование перспективных полупроводников
- Повышение скорости реакции преобразователя
Рассмотрим каждую из этих групп и выясним их влияние на производительность силовых систем. Так, увеличение частоты работы преобразователя позволяет уменьшить размер используемой индуктивности, сохраняя при этом мощность. А так как индуктивность, как можно заметить, занимает около половины объема всего преобразователя, этот шаг выглядит очень разумным с точки зрения повышения плотности мощности.
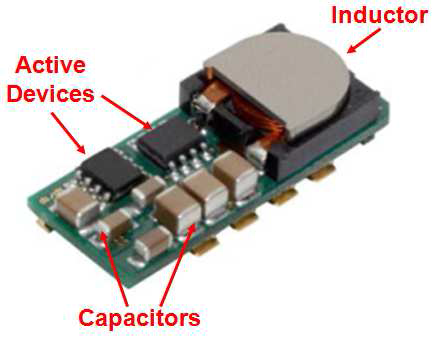
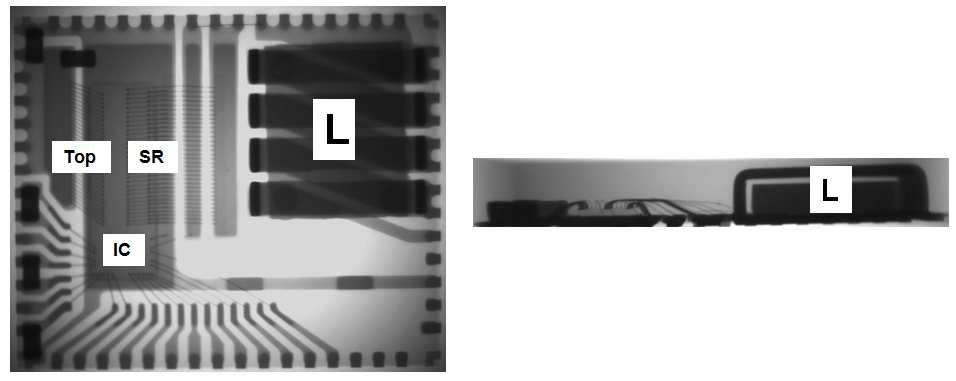
На картинках представлен dc-dc преобразователь на дискретных компонентах и рентген преобразователя, компоненты которого расположены в едином корпусе. Первый из них, как типичный представитель, работает на частоте, лежащей в диапазоне 200-500kHz. Второй - 5396QI, работает на частоте 5Mhz.
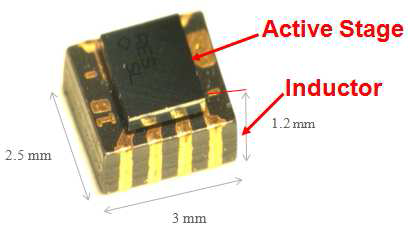
Дальнейшее же снижение размеров становится возможным в интегрированных преобразователях, размеры которых в основном определяются индуктивностью:
Однако, потери, возникающие при переключениях ключей (связанные с паразитными емкостями транзисторов или диодов), растут линейно с частотой. Этот факт заставляет исследователей работать над созданием транзисторов на основе новых полупроводников, таких как карбид кремния SiC или нитрид галлия GaN. Эти полупроводники в силу замечательных физических свойств, таких как широкая запрещенная зона и высокая подвижность основных носителей заряда. Не вдаваясь в физику процессов, скажем лишь, что эти свойства позволяют уменьшить размеры и увеличить рабочие частоты силовых транзисторов, изготовленных на основе этих полупроводников. Однако, их использование не решает проблему снижения эффективности при повышении частоты, поэтому сейчас рассмотрим возможность избежать потерь, связанных с переключениями.
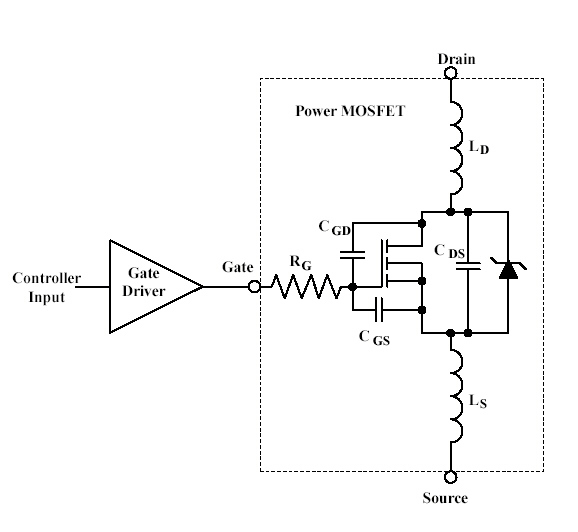
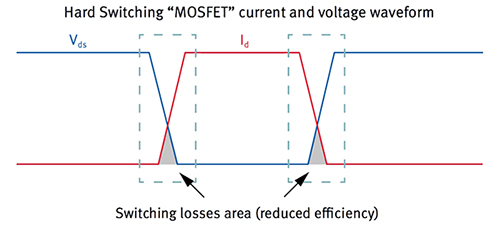
Ниже представлена схема силового транзистора и паразитных элементов, сопряженных с ним. Паразитная емкость CDS, номинал которой по порядку величины составляет сотни пикофарад, разряжается при открытии транзистора, при этом мощность потерь линейно зависит от частоты переключений и квадратично от напряжения, до которого эта емкость была заряжена. Кроме того, при открытии и закрытии транзистора, в силу конечного времени его переключения (определяется оно входной емкостью затвора и током открытия), также возникают потери, пропорциональные произведению тока на падение напряжения на нем. Таким образом, при больших напряжениях и высоких частотах, требуется уделять особое внимание потерям при переключениях.
Использование полупроводников на основе нитрида-галлия позволяет создать силовые транзисторы, обладающие значительно более низкими паразитными емкостями, при сохранении мощности, что возможно благодаря большой подвижности носителей заряда и широкой запрещенной зоны. Кроме того, его термические характеристики позволяют использовать корпус меньших размеров, что позволяет также уменьшить паразитную индуктивность. Эти факты заставляют задуматься о перспективах применения GaN транзисторов в высокочастотной силовой электронике.
Определяющую роль играет и система управления преобразователем. Физически скорость реакции хоть и определяется топологией и характеристиками преобразователя, но фактически ограничена она оказывается полосой пропускания обратной связи, которую подстраивают специальным образом, чтобы обеспечить устойчивость всей системы. Проблема в том, что динамика преобразователя нелинейная, а для синтеза контроллера используется линеаризация системы в конкретной рабочей точке. Но чем это оборачивается? Пусть система и устойчива, но при этом она проигрывает по скорости реакции, так как в результате линеаризации мы теряем способность быстро реагировать на большие отклонения регулируемой величины от рабочей точки. Математический аппарат, описывающий управление нелинейными системами с помощью нелинейных контроллеров, развит слабо. Однако, для некоторых систем можно описать способ управления основываясь на физике процесса. Так, в случае с преобразователем это может быть энергия, запасенная в выходной емкости, которая как раз и определяет уровень выходного напряжения при заданной емкости.


Банальный примером может служить сравнение современных самолетов, использующих линейные регуляторы для управления своей линеаризованной динамикой (при малых углах атаки), и птиц, повсеместно использующих нелинейную динамику в своих полетах, приводит к определенным мыслям о целесообразности учета нелинейных процессов.
Преобразователи с цифровым управлением стали объектом пристального внимания в связи с ростом производительности микроконтроллеров и их удешевлением. И хотя аналоговые цепи управления встречаются в подавляющем большинстве преобразователей, гибкость и возможности цифровых систем управления не останутся незамеченными в индустрии силовой электроники.
Быстро реагирующий модулируемый источник питания с рекуперацией энергии
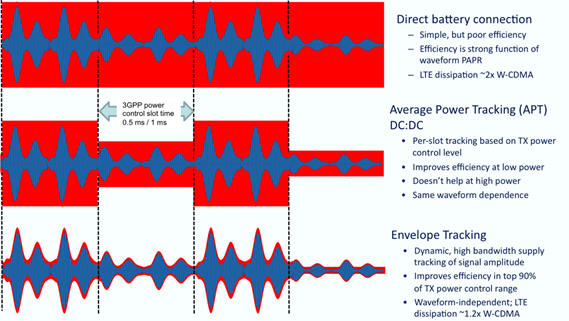
Существует класс так называемых динамических источников питания, используемых в большинстве случаев для питания линейных усилителей. Так, технология envelope tracking, используемая в средствах телекоммуникаций, позволяет понять основную идею и предназначение динамических источников питания.
Но как еще возможно использовать эту идею? Один из ответов - это предмет данной статьи. Быстро реагирующий модулируемый источник питания с рекуперацией энергии - BiVoS - устройство, прямое назначение которого не ясно, однако потенциал которого все равно заставляет о нем задуматься. Так, линейное управление электромоторами и управление пьезоактуаторами - вполне естественное применение для BiVoS. Кроме того, его можно использовать в качестве источника питания для тестировочных и исследовательских стендов.
Возможность рекуперации энергии, а также способность как повышать, так и понижать выходное напряжение относительно входного, накладывает требование симметрии на преобразователь. Наиболее подходящей топологией в исследуемом случае является топология buck-boost:
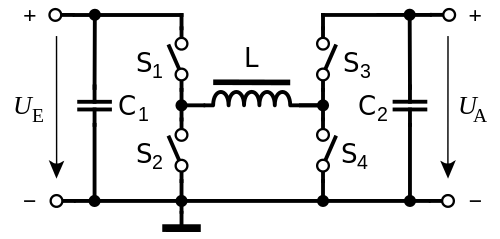
Почему это так? Топология симметрична, позволяет как повышать, так и понижать напряжение. Индуктивность только одна, что положительно сказывается на конечном размере, а так же исключает промежуточную стадию, где происходило бы накопление энергии. Кроме того, анализ этой топологии прост, так как ее можно рассматривать как повышающий преобразователь, подключенный вслед за понижающим.
Контроллер BiVoS
Для того, чтобы разрешить задачу стабилизации выходного напряжения на выходе преобразователя, проанализируем, что поддается нашему контролю. Если подвергнуть преобразователь стандартному методу анализа, при котором выполняется линеаризация динамики в окрестности рабочей точки, то полученное выражение передаточной функции от коэффициента заполнения управляющего сигнала (т.е. отношение времени, когда ток в индуктивности разгоняется к периоду переключений) к выходному напряжению позволит синтезировать необходимую цепь обратной связи. Но этим путем мы не пойдем. Вместо этого будем рассматривать задачу преобразования как набор дискретных шагов по накоплению энергии в индуктивности и последующей передачей этой энергии в выходную емкость.
Здесь можно самостоятельно поэкспериментировать с такой схемой работы: Наглядная схема работы
Выполнив анализ преобразователя при работе в стационарном режиме, с точки зрения дискретных шагов, можно получить связь выходного тока, выходного напряжения и входного напряжения и пиковых токов в индуктивности для заданных параметров преобразователя (выходная емкость и индуктивность). Кроме того, записав закон сохранения энергии, можно получить изменение выходного напряжения при известной энергии в индуктивности.
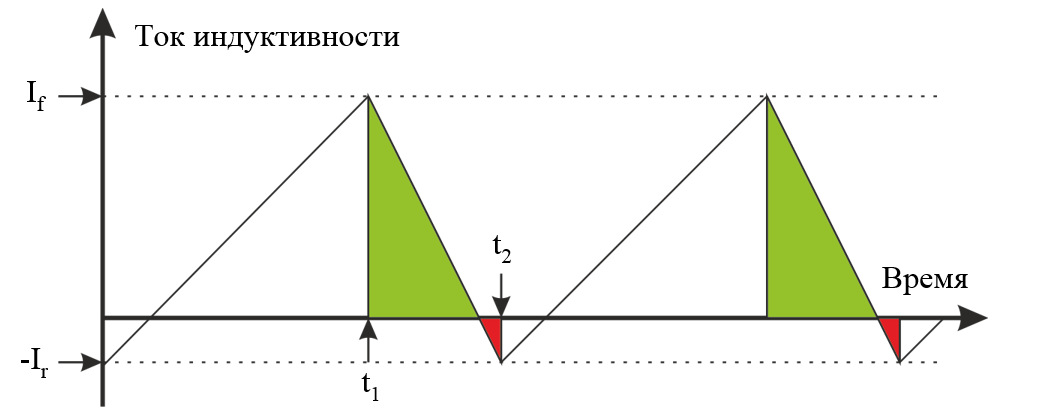
Где If - пиковый ток через индуктивность в прямом направлении, Ir - в обратном направлении. В момент времени t1 заканчивается этап разгона тока в индуктивности и начинается передача энергии в выходную емкость. В момент времени t2 заканчивается обмен энергии между выходной емкостью и индуктивностью.
Зачем разгонять ток в обратном направлении? Это позволит использовать этот ток для разряда паразитных емкостей транзисторов, чтобы выполнить их мягкое открытие.
Таким образом, управляющие уравнения для стационарного режима работы и для изменения напряжения за шаг примут следующий вид:
Где Vnow и Vnext - это уровни напряжения в выходной емкости C в начале и в конце шага соответственно.
Говоря простым языком, первое уравнение указывается какой ток нужно достичь на этапе разгона тока в индуктивности, чтобы компенсировать расход энергии током потребления Iпотр, второе уравнение указывает, как нужно разогнать ток в индуктивности, чтобы Vnext совпало с требуемым напряжением на выходе.
Пассивные компоненты
Из приведенных выше уравнений закона сохранения энергии видно, что соотношение между емкостью и индуктивностью определяет величину изменения напряжения при заданном токе. Таким образом, емкость C и индуктивность L определяют влияние одного "шага" по передачи энергии на выходное напряжение. Уменьшение выходной емкости таким образом ускорит быстродействие преобразователя, так как уменьшит число шагов, необходимых для установления выходного напряжения на требуемом уровне. Существует и обратная сторона такого быстродействия - малая выходная емкость приводит к увеличению пульсаций выходного напряжения. Поэтому повышение частоты переключений преобразователя, что приведет к учащению следования "квантов энергии", может стать подспорьем при дальнейшей оптимизации быстродействия и точности одновременно.
Архитектура преобразователя
Описанный выше способ работы преобразователя требует определенных свойств, таких как знание входного\выходного напряжения, знание тока в индуктивности и выходного тока. Причем наши знания о токе в индуктивности должны быть в аналоговом виде, так как оцифровка очень быстро меняющегося сигнала была бы дорогим и сложным решением. Поэтому была спроектирована архитектура следующего вида:
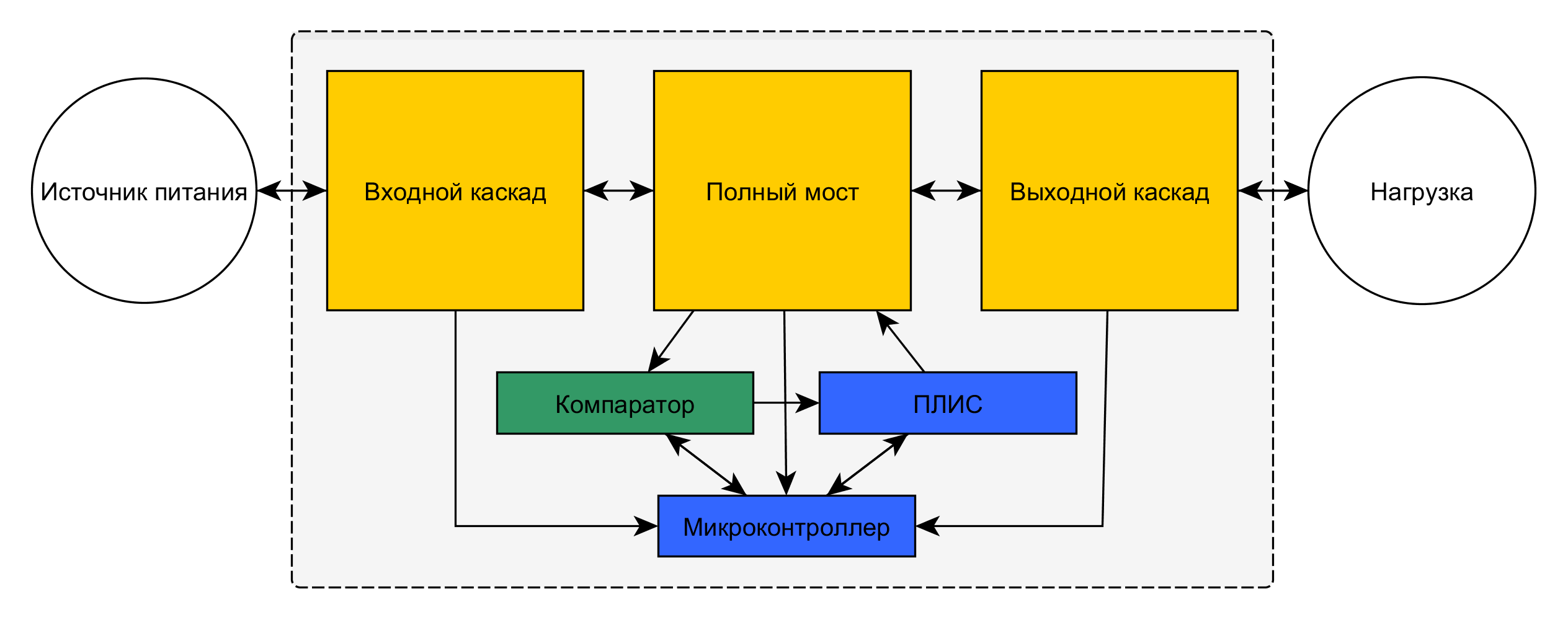
Входной каскад содержит защиту от перенапряжения и фильтрацию, а также каскад входных конденсаторов и световую индикацию. Кроме того, во входной каскад входит понижающий dc-dc преобразователь и линейные стабилизаторы для питания цифровой части.
Полный мост, помимо четырех галлий-нитридных преобразователей, содержит две силовые индуктивности и измерителем тока между ними с аналоговым выходом (таким образом функционально - это одна силовая индуктивности и датчик тока "внутри" нее).
Выходной каскад также содержит защиту от перенапряжения и выходную емкость, а также датчик выходного тока.
Линейный компаратор непрерывно сравнивает уровень тока в силовой индуктивности с двумя опорными уровнями, расчетом и установкой которых занимается микроконтроллер. При достижении тока в индуктивности необходимого уровня, компаратор генерирует сигнал на ПЛИС, которая в свою очередь занимается переключением транзисторов в соответствии с логикой работы преобразователя.
Микроконтроллер занимается оцифровкой уровней входного\выходного напряжения и выходного тока с помощью ADC, на основании этих измерений он проводит расчеты уровней тока, устраняющих ошибку управления на следующем шаге, а затем выставляет их в качестве опорных сигналов для линейного компаратора.
Выбор deadtime
Чтобы открыть транзистор в режиме ZVS, необходимо разрядить его паразитную емкость, для чего необходим ненулевой ток в индуктивности, о котором было рассказано ранее (ток "в обратном направлении"). За время разрядки паразитных емкостей этот ток можно считать постоянным, так как эта емкость и, соответственно, заряд, в ней накопленный, мал. Однако, заряд емкости зависит линейно от напряжения, а значит время разряда пропорционально напряжению и обратно пропорционально току. Точно подгадать момент, когда емкость разрядилась, не представляется возможным, так как заряд паразитной емкости на самом деле является нелинейной функцией напряжения на этой емкости, наши знания о токе и напряжении ограничены точности измерителей и их временным разрешением, а математические расчеты требуют времени, превышающего длительность таких процессов.
Таким образом открытие транзисторов будет происходить с небольшим напряжением на них, которое определяется или внутренним диодом транзистора, или зарядом на паразитной емкости этого транзистора. Чем позже будет открыт транзистор, тем больше потери на диодную проводимость, чем раньше, тем больше потери энергии, запасенной в паразитной емкости. Причем подходящий момент открытия будет меняться в зависимости от величины тока в обратном направлении и напряжения, приложенного к закрытом транзистору.
В рамках данной работы deadtime определялось рассчетными минимальными потерями в среднем по всем штатным режимам работы преобразователя, предполагая их равновероятными. Определяемое как разница моментов закрытия одного полумоста и открытия другого, оно составило около 10 наносекунд.
Симуляция преобразователя и алгоритма управления
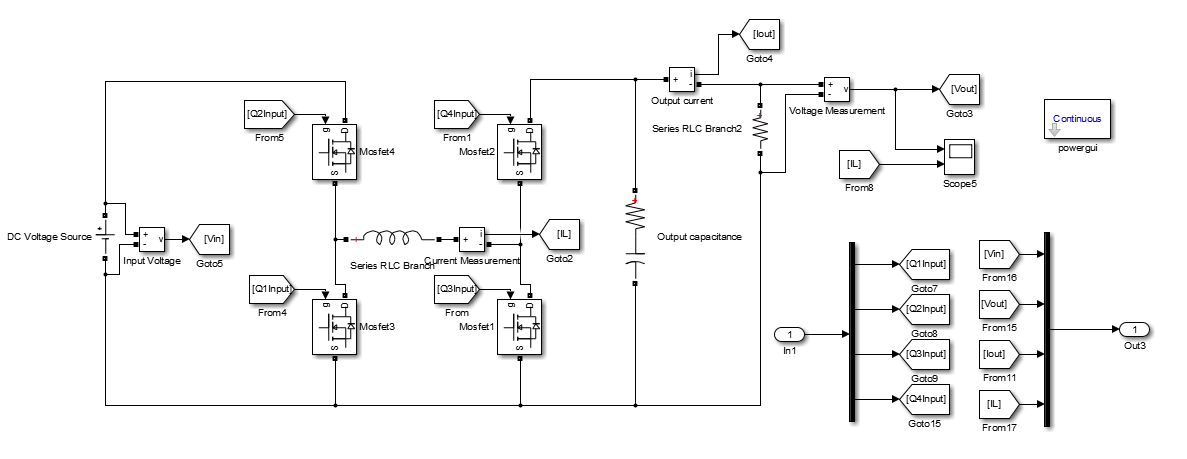
Для выяснения работоспособности преобразователя, а также для расчета тепловыделения была спроектирована физическая модель в среде MATLAB-Simulink. Эта модель учитывает все переходные процессы, происходящие в преобразователе в ходе его работы (кроме потерь в сердечнике индуктивности). Это позволяет выяснить распределение потерь мощности по элементам преобразователя и выполнить их оптимизацию.
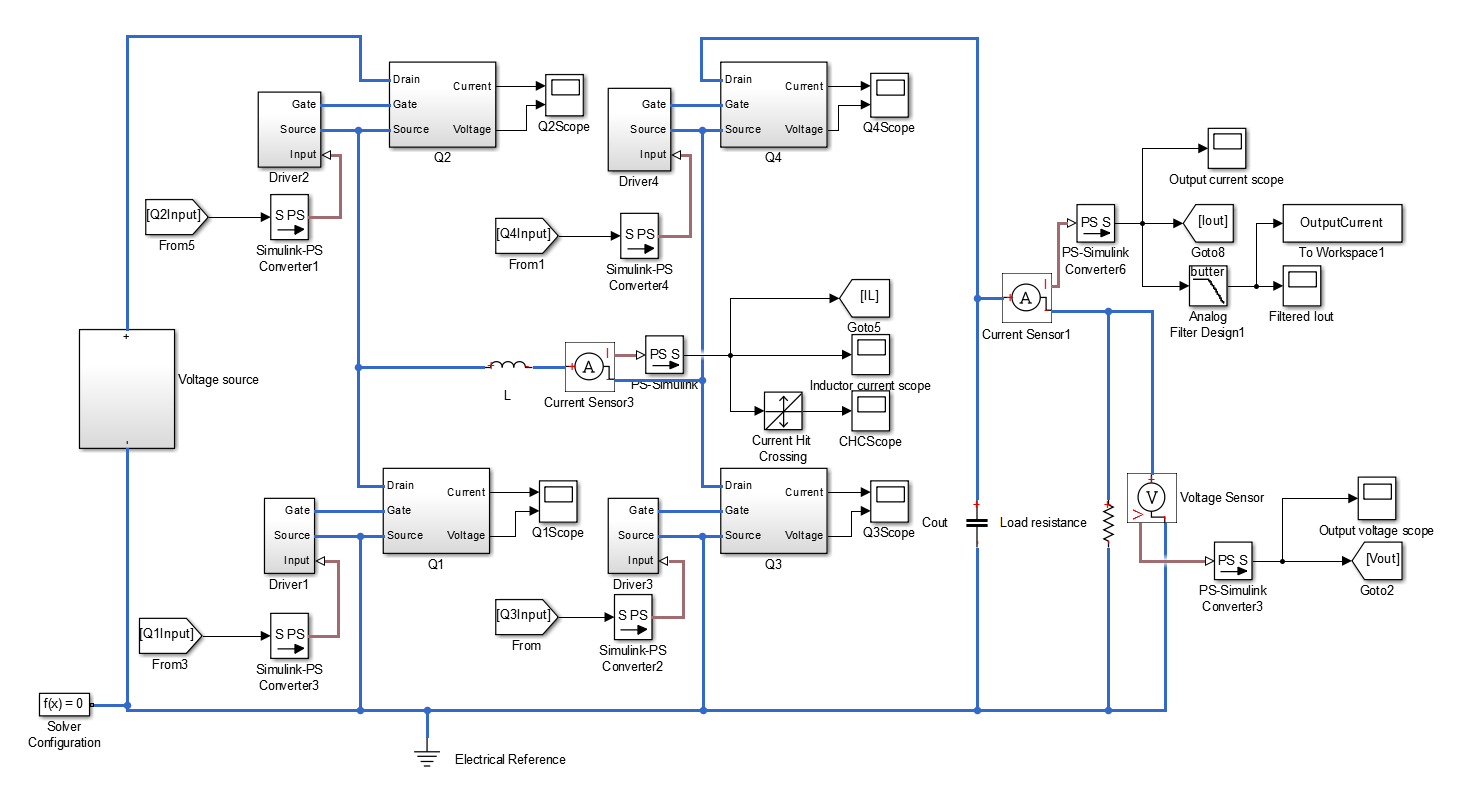
Физическая схема преобразователя в среде Simulink
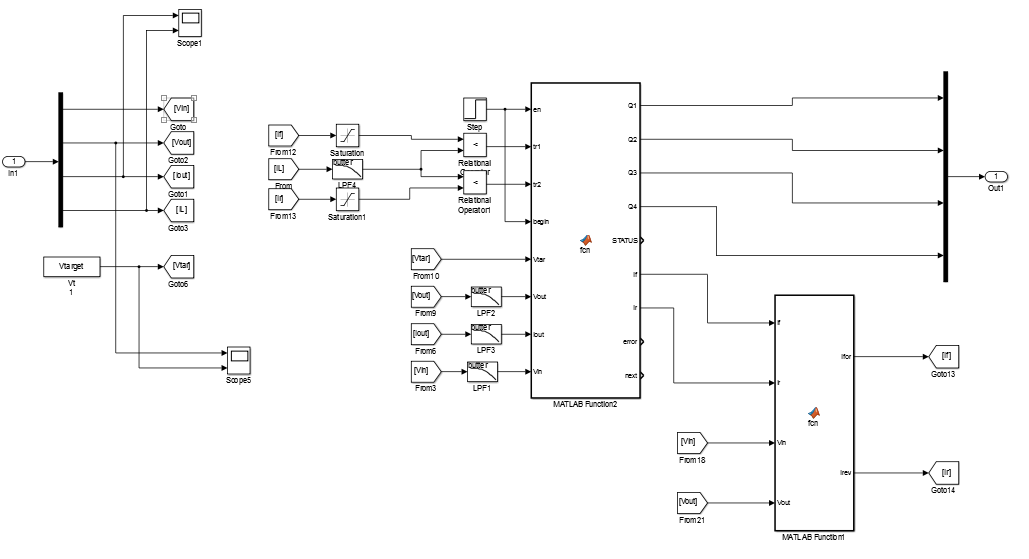
Для разработки и оптимизации алгоритма управления была создана упрощенная модель, не учитывающая потери при переходных процессах, но верно передающая динамику преобразователя и ширину пропускания фильтров и измерителей.
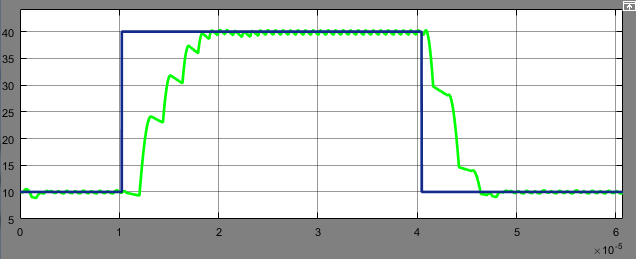
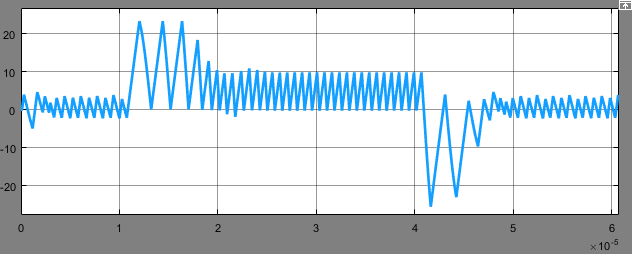
Реакция на изменения требуемого напряжения с 10В до 40В, и соответствующий ток в индуктивности, по осям вольты, амперы, время в секундах
Проектирование BiVoS
После того, как симуляция подтвердила работоспособность идей, было принято решение реализации BiVoS в железе. При этом особое внимание уделялось электромагнитной совместимости. Так, аналоговая и цифровая часть располагаются ниже силовой части и используют отдельные земли.
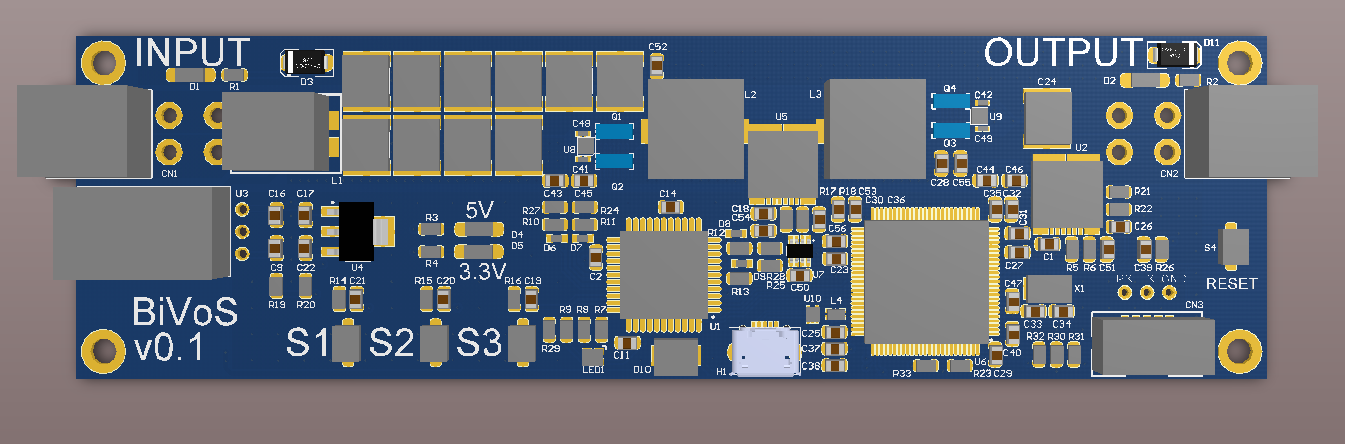
BiVoS - 3D модель

BiVoS - изготовленное устройство
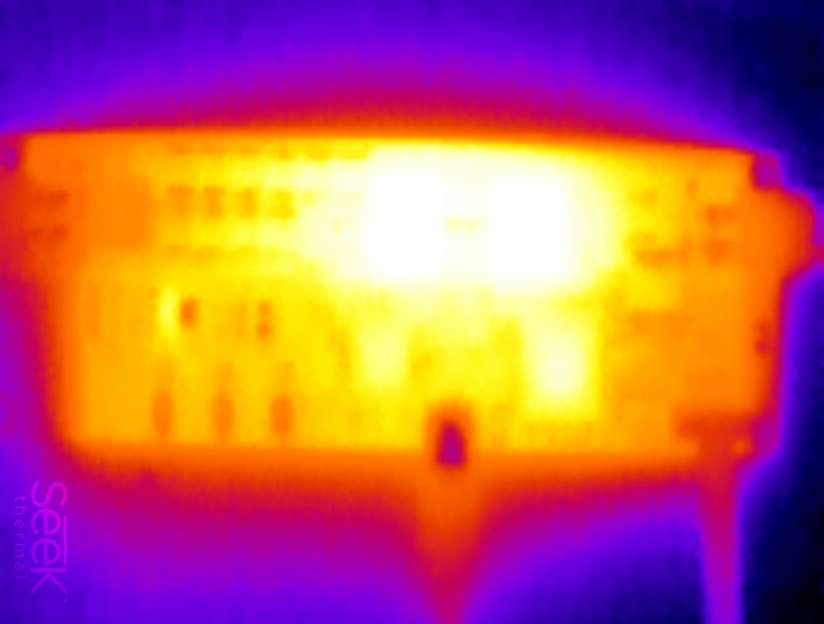
BiVoS - распределение нагрева при работе, температура самой горячей точки 70 градусов по цельсию
Результаты
Был проведен полный цикл разработки устройства, начиная с проектирования модели и ее симуляции, заканчивая проектированием и изготовлением конечного устройства. Итак, конечное устройство продемонстрировало:
1) Быстрое установление требуемого напряжения (примерно 2В за 10 микросекунд)
2) Возможность модуляции питающего напряжения произвольным сигналом (полоса пропускания составила примерно 10кГц),
3) Пиковую эффективность более 80%
4) Реакцию на скачок тока потребления за один шаг преобразования
5) Возможность рекуперации энергии выходной емкости и втекающего тока
6) Максимальную мощность 20Вт
7) Диапазон входных напряжений: 8-20В, выходных напряжений: 1-20В
Недостатки:
1) Частота преобразования ограничена в силу большого времени вычисления параметров следующего шага, что увеличило пульсации выходного напряжения и уменьшило максимальную мощность
2) Алгоритм не компенсирует статическую ошибку (постоянная компонента ошибки управления), так как нет учета потерь, а также нет автоматического подбора параметров, что исключает возможность достаточно эффективно управлять емкостной нагрузкой
3) Выбор фиксированного времени задержки между закрытием и открытием транзисторов привел к снижению эффективности в силу лишь частичной реализации «мягких» переключений в одних случаях или излишней диодной проводимости в других
Об авторах
Над данным проектом, в качестве темы своего диплома, работал студент Физического факультета МГУ Павлов Андрей Юрьевич под руководством кандидата физ.-мат. наук Запуниди Сергея Александровича. Его знакомство с силовой электроникой началось на 3 курсе в Лаборатории Инженерной Физики с исследования перспективных GaN транзисторов, логическим же завершением стало проектирование и создание силового преобразователя на основе этих транзисторов. Кажущееся отсутствие смысла работы и ограниченность применения данного преобразователя объясняется сугубо научным и инженерным интересом к экспериментам на базе новых подходов к решению привычных задач силовой электроники.

Павлов Андрей

Запуниди Сергей